واابی: شبیهسازی واقعگرایانه ما ایمنی کامیونهای روباتیکی واقعی را ثابت میکند
به گفته این شرکت، استفاده از شبیهسازی بسیار واقعگرایانه راهی مؤثرتر برای اثبات ایمنی در دنیای واقعی است، بدون اینکه نیازی به طی مسافتهای واقعی باشد.
استارتاپ کانادایی Waabi میگوید شبیهسازی فوقواقعگرایانهاش اکنون آنقدر دقیق شده که میتوان با استفاده از آن، ایمنی کامیونهای بدون راننده را بدون نیاز به پیمایش کیلومترها در جادههای واقعی اثبات کرد.
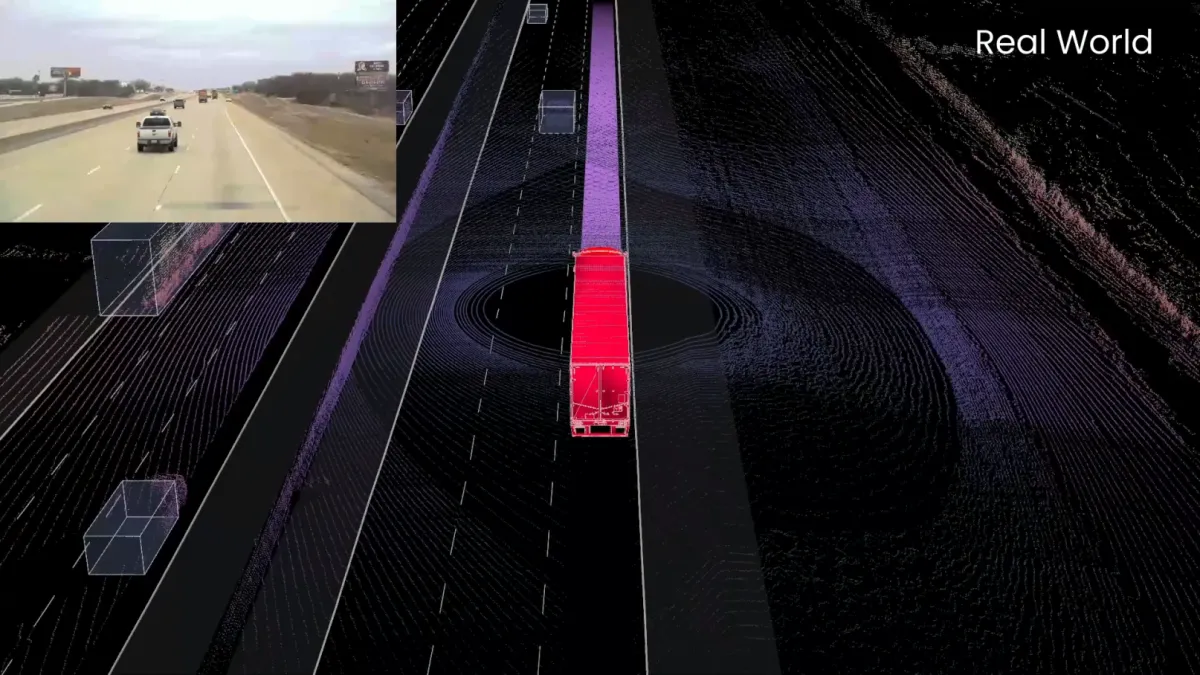
این شرکت با استفاده از یک دوقلوی دیجیتال از کامیون رباتیک واقعی خود—که با دادههای واقعی حسگرها تغذیه میشود—عملکرد آن را با کامیونهای واقعی در شرایط جادهای واقعی مقایسه میکند. Waabi ادعا میکند که این دو اکنون تقریباً کاملاً با هم منطبقاند. به گفته این شرکت، این روش راهی بهتر برای اثبات ایمنی نسبت به صرفاً پیمایش مسافتهای واقعی است؛ کاری که بسیاری از رقبایش انجام میدهند.
راکل اورتاسون، بنیانگذار و مدیرعامل پرشور Waabi (و استاد دانشگاه تورنتو) میگوید: «این روش شفافیت را به این صنعت میآورد. دیگر بهانهای باقی نمیماند.»
اورتاسون پس از ترک شرکت Uber—که در آن هدایت بخش خودروهای خودران را بر عهده داشت—در سال ۲۰۲۱ Waabi را با چشماندازی متفاوت برای توسعه وسایل نقلیه خودران بنیان گذاشت. این شرکت، که با Uber Freight و ولوو همکاری دارد، از سال ۲۰۲۳ کامیونهای واقعی خود را در جادههای ایالت تگزاس به حرکت درآورده، اما عمده فعالیت توسعهای خود را در محیط شبیهسازیشدهای به نام Waabi World انجام میدهد. Waabi اکنون قصد دارد رویکرد «اول شبیهسازی» خود را گسترش دهد و نهتنها برای آموزش و آزمایش مدلهای رانندگی از آن استفاده کند، بلکه برای اثبات ایمنی آنها در دنیای واقعی نیز بهره ببرد.
در حال حاضر، کامیونهای Waabi همچنان با حضور انسان در کابین حرکت میکنند. اما این شرکت قصد دارد تا پایان امسال به صورت کامل بدون راننده فعالیت کند. برای این منظور، باید ایمنی سیستم خود را به نهادهای نظارتی اثبات کند. اورتاسون میگوید: «این کامیونها ۸۰ هزار پوند وزن دارند. واقعاً رباتهایی عظیمالجثه هستند.»
اورتاسون استدلال میکند که اثبات ایمنی این کامیونها تنها از طریق رانندگی در جادههای واقعی امکانپذیر نیست. برخلاف رباتاکسیها که معمولاً در خیابانهای شلوغ فعالیت میکنند، بسیاری از کامیونهای Waabi مسیرهای طولانی در بزرگراههای مستقیم طی میکنند، که به گفته او به اندازه کافی با موقعیتهای خطرناک روبهرو نمیشوند تا سیستم را بهطور کامل مورد ارزیابی قرار دهند.
اما پیش از آنکه بتوان از Waabi World برای اثبات ایمنی در دنیای واقعی استفاده کرد، ابتدا باید نشان داد که رفتار کامیونها در شبیهسازی دقیقاً با رفتار آنها در واقعیت تحت شرایط مشابه مطابقت دارد.
واقعیت مجازی
در محیط Waabi World، همان مدل رانندگی که کامیونهای واقعی Waabi را کنترل میکند به یک کامیون مجازی متصل میشود. Waabi World ورودیهایی شبیهسازیشده فراهم میکند که شبیه به دادههای واقعی حسگرهای کامیونها هستند. این شبیهسازی میتواند طیف گستردهای از شرایط آبوهوایی و نوری را بازآفرینی کند. اورتاسون میگوید: «ما عابر پیاده، حیوانات و از این دست چیزها داریم. اشیای نادر هم داریم—مثل تشکی که از پشت یک کامیون دیگر در حال پرتاب شدن است. هر چیزی.»
Waabi World همچنین ویژگیهای فیزیکی خود کامیون، مانند شتاب، مومنتوم، تعویض دندهها و حتی کامپیوتر داخلی آن را نیز شبیهسازی میکند—از جمله تأخیرهای زمانی در حد میکروثانیه بین دریافت دادهها از حسگرهای مختلف و پردازش آنها. اورتاسون میگوید: «زمانی که طول میکشد تا اطلاعات پردازش شود و خروجی تولید شود، تأثیر زیادی بر ایمنی سیستم دارد.»
برای اثبات دقت شبیهسازی، Waabi آن را بهعنوان یک دوقلوی دیجیتال از جهان واقعی اجرا کرده و میزان اختلاف آن با رویدادهای واقعی را اندازهگیری میکند.
چگونه این کار انجام میشود؟
هر زمان که کامیونهای واقعی Waabi در بزرگراه حرکت میکنند، تمام دادهها—ویدیو، رادار، لیدار، وضعیت مدل رانندگی و غیره—ضبط میشود. سپس میتوان به یک لحظه خاص بازگشت، قاب تصویر را با تمام دادههای حسگرها بازسازی کرد، و آن را در Waabi World قرار داد و دکمه اجرا را فشرد.
سناریویی که در آن کامیون مجازی همان مسیر کامیون واقعی را طی میکند، باید تقریباً کاملاً با واقعیت منطبق باشد. Waabi سپس انحراف شبیهسازی از دنیای واقعی را اندازهگیری میکند.
هیچ شبیهسازیای قادر به بازسازی کامل تعاملات پیچیده دنیای واقعی در طولانیمدت نیست. بنابراین Waabi هر ۲۰ ثانیه یک برش زمانی انتخاب میکند و هزاران سناریو را با آن اجرا میکند—از تغییر خط مسیر گرفته تا ترمز ناگهانی، ترافیک مخالف و غیره.
Waabi ادعا میکند که دقت Waabi World به ۹۹.۷٪ رسیده است. اورتاسون توضیح میدهد: «تصور کنید یک کامیون با سرعت ۳۰ متر در ثانیه در حال حرکت است. وقتی ۳۰ متر جلو میرود، ما میتوانیم پیشبینی کنیم که همهچیز در چه موقعیتی خواهد بود—با دقت ۱۰ سانتیمتر.»
Waabi قصد دارد از این شبیهسازی بهعنوان بخشی از مستندات برای دریافت مجوز حذف راننده انسانی در سال جاری استفاده کند. اورتاسون میگوید: «این بخش بسیار مهمی از شواهد است. البته تنها مدرک ما نیست. ما همه مستندات سنتی اداره راهنمایی و رانندگی را هم داریم—تمام استانداردهای صنعت. اما هدف ما ارتقای این استانداردها به سطحی بسیار بالاتر است.»
جیمی شاتن، دانشمند ارشد استارتاپ خودروی خودران Wayve، میگوید: «تطابق ۹۹.۷٪ در مسیر حرکتی، نتیجهای چشمگیر است.» اما او خاطرنشان میکند که Waabi جزئیات فنی فراتر از یک پست وبلاگی منتشر نکرده است: «بدون اطلاعات فنی، نمیتوان بهطور کامل درباره اهمیت این عدد قضاوت کرد.»
شاتن میگوید Wayve از ترکیب آزمایشهای واقعی و مجازی استفاده میکند: «هدف ما فقط بازتولید رفتار گذشته در رانندگی نیست، بلکه ساخت محیطهای آزمایشی و آموزشی غنیتر و چالشبرانگیزتر است تا تواناییهای خودروهای خودران را فراتر ببریم. اینجا جایی است که تستهای واقعی همچنان ارزش حیاتی دارند، زیرا خودرو را در معرض تعاملات خودجوش و پیچیدهای قرار میدهند که شاید شبیهسازی بهتنهایی نتواند آنها را بهطور کامل بازسازی کند.»
با این حال، اورتاسون معتقد است که رویکرد Waabi برای موفقیت صنعت خودروهای خودران در مقیاس وسیع ضروری است: «این یکی از شکافهای بزرگ فعلی را پر میکند. این یک فراخوان برای اقدام است—یعنی، عددت رو نشون بده. زمان پاسخگویی در سراسر این صنعت فرا رسیده است.»
Credits: "Waabi says its virtual robotrucks are realistic enough to prove the real ones are safe" By Will Douglas Heaven, published in MIT Technology Review.
Read full article here: https://www.technologyreview.com/2025/03/11/1113044/waabi-says-its-virtual-robotrucks-are-realistic-enough-to-prove-the-real-ones-are-safe/